Product Details
Venkovní robotická platforma pro snímání senzorových dat a experimentální ověřování algoritmů 3D rekonstrukce
Created: 2015
Beran Vítězslav, doc. Ing., Ph.D. (DCGM FIT BUT)
Španěl Michal, Ing., Ph.D. (DCGM FIT BUT)
Veľas Martin, Ing., Ph.D. (DCGM FIT BUT)
Kapinus Michal, Ing. (DCGM FIT BUT)
outdoor platform, Velodyne LiDAR, stereo camera, experimental data sets, ROS, autonomous vehicle
The device is a functional sample of robotic platform. It is fitted with sensors for capturing data for further analysis and evaluation of 3D mapping and reconstruction algorithms. The robot built on top of Pioneer 3-AT base is usable in both indoor and outdoor conditions which for instance makes it suitable as a testing platform for autonomous driving based on sensory data processing via computer vision algorithms. The software equipment is based on meta-operating system ROS (Robot Operating System) defining structure of sensor and command messages. Prepared ROS modules provides a lot of functionality for data acquisition and analysis and allows easy portability of developed algorithms to another robotic platform. The robot can be controlled manually as well as autonomously by setting navigation goals in its map of imminent surroundings.
Laboratory O104 (1st floor), building of FIT BUT Brno, Bozetechova 1, 612 66 Brno, Czech Republic
For information and license conditions contact please: Mgr. Michaela Burianová, Research Centre of Information Technology, Faculty of Information Technology, Brno University of Technology, Božetěchova 2, 612 66 Brno, 541 141 470, http://www.fit.vutbr.cz/~burianova/
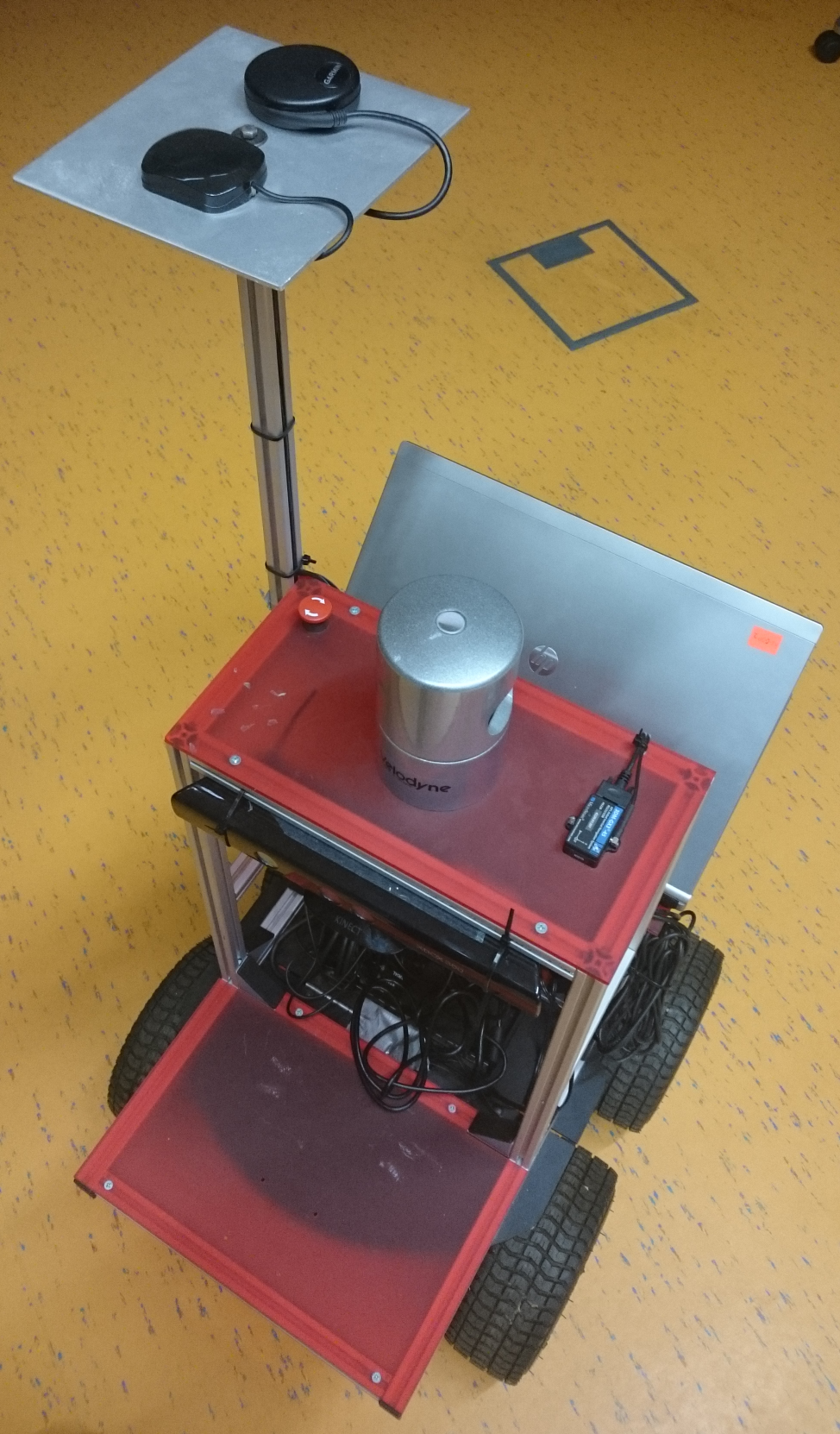
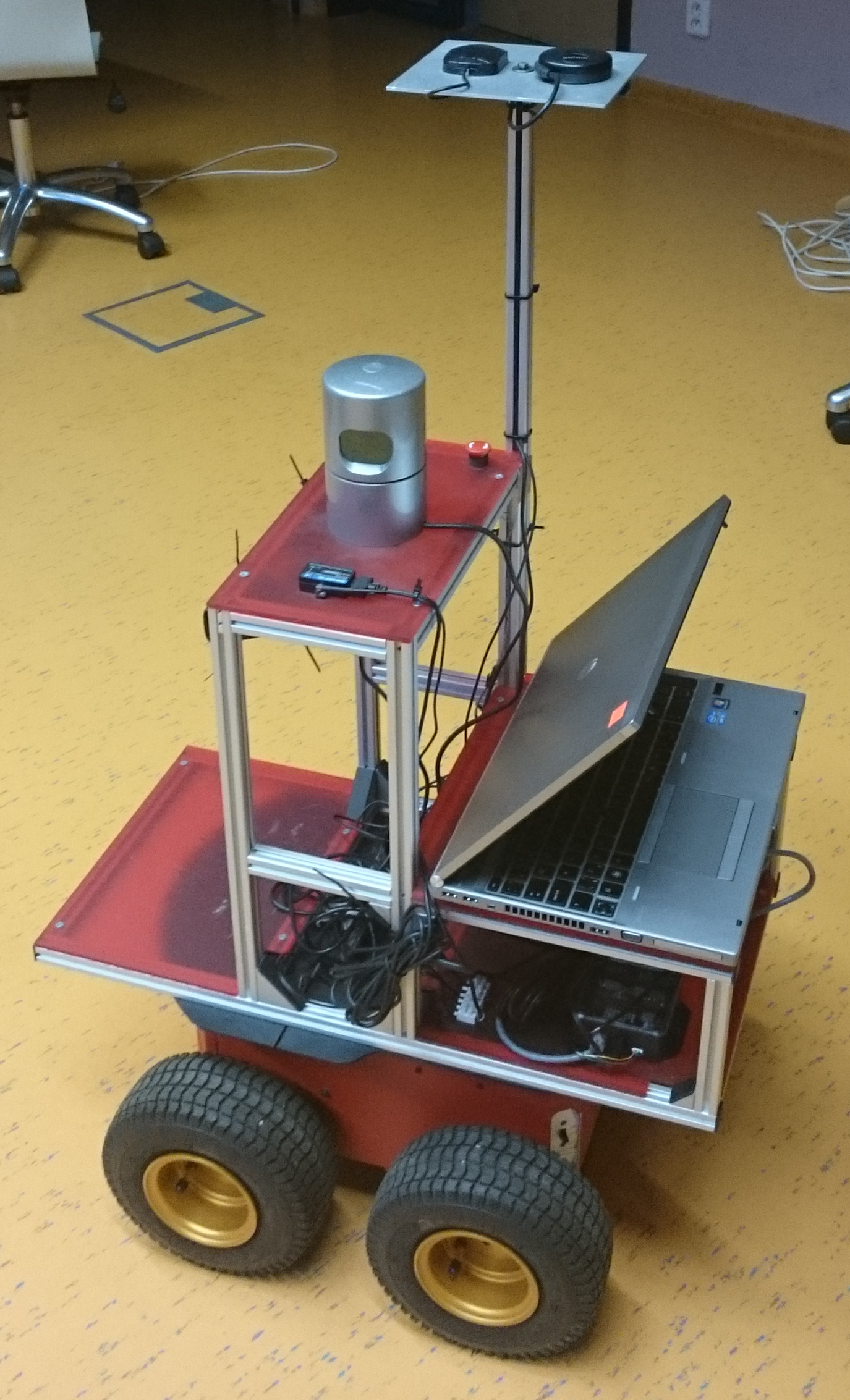
- png A support for an antenna of the AHRS unit and a separate GPS unit connected to the Velodyne sensor is mounted on the right side of the construction. 1898 KB
- png A view on robot's battery compartment able to fit up to three maintenance free lead-acid accumulators. 444 KB
- png The robotic base Pioneer 3AT has been extended by a construction made of aluminium profiles and plastic desks to mount the required senzors. The construction in its rear part has a place for a computational and control computer. 3386 KB
- png Visualization of the robot model and Velodyne sensor data. 297 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}